


Dve najveće misterije u prirodi su: UM i VASIONA. Zahvaljujući moćnoj tehnologiji u stanju smo da fotografišemo galaksije daleke milijardu svetlosnih godina. Međutim, šta je sa ljudskim mozgom, da li ga dobro poznajemo ili da li ga uopšte znamo? Da li je moguće veštački razviti inteligentne sisteme ako ne znamo tačno na koji način funkcioniše ljudski mozak, koji opet dalje koristimo prilikom projektovanja i razvoja veštačke inteligencije?

Prof. dr Dragan Aleksendrić
Ljudski mozak teži samo oko kilogram i po a ipak je najsloženiji objekat u Sunčevom sistemu. Šta je to što ljudima daje prednost u odnosu na druge životinje? To je svest.
Svest je proces pravljenja MODELA sveta pomoću većeg broja petlji povratne sprege raznih parametara (npr. temperature, prostora, vremena, odnosa sa drugim ljudima…) kako bi se ostvario cilj. Ovo se naziva prostorno-vremenskom teorijom svesti jer naglašava ideju da životinje model sveta stvaraju pretežno u odnosu na prostor i na druge životinje, dok ljudi idu korak dalje i model sveta grade prema vremenu, kako spram prošlosti tako i spram budućnosti. Šta razdvaja ljudsku svest od životinjske? JEDINO LJUDI RAZUMEJU KONCEPT SUTRAŠNJICE!
Mnogi veruju da jedinstvene osobine ljudskih
bića, kao što su kreativnost, emocije,
svest ne mogu biti reprodukovane od strane
nekog drugog tehničkog sistema.
Za razliku od životinja, jedino ljudi se neprestano pitaju „šta-ako”, na ovaj način se pravi okvir za predviđanje budućih događaja. Dakle, ljudi neprestano procenjuju prošlost kako bi se simulirala budućnost! Ovim dolazimo do ključne osobine budućih inteligentnih sistema, odnosno veštačke inteligencije, kao okosnice industrijskog razvoja u 21. veku, a to je razvoj inteligentnih mašina i modela koji opisuju rad i performanse tehničkih sistema. Na osnovu ove sposobnosti i ovakvih modela, moguće je vršiti predviđanja njhovih performansi i ponašanja u budućnosti. To je upravo ono što naš mozak neprestano radi!
Mnogi veruju da jedinstvene osobine ljudskih bića, kao što su kreativnost, emocije, svest ne mogu biti reprodukovane od strane nekog drugog tehničkog sistema. Time se dolazi do ključnog pitanja a to je šta se može smatrati inteligentnim sistemom u tehnici i na koji način u budućnosti omogućiti da posmatrani sistem postane, odnosno zadrži željeni nivo inteligentnosti. Ukoliko želimo da neki sistem u dužem vremenskom periodu zadrži i unapređuje svoje osobine, takav sistem bi trebalo da ima ugrađene mehanizme da uči, izvodi zaključke i prilagođava se novim uslovima rada.
Važne osobine budućih inteligentnih
sistema treba da budu: učenje, „kreativnost”,
brzina „mišljenja”, rezonovanje, razumevanje,
autonomno ponašanje, adaptibilnost,
sposobnost samoorganizovanja, posedovanje
znanja i druge.
Opšta definicija šta je to inteligentno a šta ne nije do sada usvojena i često se različito tumači delom i zbog toga što ona treba da prati sveukupni razvoj društva i tehnike. Dakle, važne osobine budućih inteligentnih sistema treba da budu: učenje, „kreativnost”, brzina „mišljenja”, rezonovanje, razumevanje, autonomno ponašanje, adaptibilnost, sposobnost samoorganizovanja, posedovanje znanja i dr. Sa druge strane, niko drugi, sem ljudskih bića, ne može ispuniti sve ove zahteve inteligentnosti.
Međutim, ako sistem ispunjava neke od gore navedenih atributa, tada bi on posedovao i neki oblik inteligencije. Na osnovu ovoga možemo zaključiti da sistem koji radi dovoljno brzo, za date radne uslove, i koji ima izvesne osobine logičkog rezonovanja, bi mogao biti svrstan u grupu „pametnih“ sistema. Jasno je da u budućnosti možemo da govorimo o različitim oblicima i stepenima inteligentnosti mašina, vozila, projektila i tako dalje, s obzirom na različite potrebe (koje se takođe menjaju) u pogledu izvršavanja funkcije cilja pojedinih sistema u tehnici.
Po mnogim filozofskim koncepcijama
znanje predstavlja tvrđenje za koje je utvrđeno
ili može biti utvrđeno da je tačno.
Uobičajeno se pod inteligencijom podrazumeva sposobnost usvajanja, pamćenja i obrade određenih podataka i njihovo pretvaranje u različite vrste znanja. Ipak do sada nijedna definicija veštačke inteligencije nije opšte prihvaćena. U opštem slučaju se može smatrati da inteligencija podrazumeva: sposobnost pamćenja, skladištenja podataka, pretraživanja podataka i mogućnost njihove obrade u cilju donošenja odluka u novim, odnosno nepoznatim okolnostima. Pri tome je važno omogućiti dobru generalizaciju uočenih zakonitosti kao i njihovo predstavljanje i preslikavanje u formi razumljivoj ljudima, lako modifikovanje uz smanjenje ukupnog broja mogućnosti koje bi trebalo razmatrati.
Po mnogim filozofskim koncepcijama znanje predstavlja tvrđenje za koje je utvrđeno ili može biti utvrđeno da je tačno. Sa druge strane, često postoji potreba za radom i sa podacima koji ne moraju da budu tačni ili bar ne potpuno tačni, pa je bolje prihvatiti širi pojam znanja i pod njime podrazumevati i istinite, potvrđene činjenice, ali i hipoteze, nepotpune informacije, kao i one date sa određenom verovatnoćom. Izbor reprezentacije znanja je jedan od ključnih problema i on je u direktnoj vezi sa prirodom određenog znanja, ali i sa prirodom mehanizama za zaključivanje. Ovo postavlja velike izazove u inženjerstvu inteligentnih sistema.
Kada govorimo o sistemima u tehnici, ovaj pojam se koristi za opisivanje nekog organizacionog skupa, sličnih ili različitih elemenata, objedinjenih određenim zajedničkim obeležjima ili funkcijama. Sistem u tehnici je organizovan skup elemenata objedinjenih zajedničkom funkcijom cilja. Zadatak sistema u tehnici se svodi na pretvaranje ulaznih veličina u izlazne veličine i to u određenom periodu vremena.
Savremeni sistemi u tehnici imaju izrazito dinamički karakter promene ulaza i/ili izlaza. Pored toga, sistem generalno uvek izvršava svoju funkciju cilja u nekoj okolini koja na njega utiče posredno ili neposredno. Važno je naglasiti da je okolina, po svojoj prirodi i karakteru gotovo uvek stohastička, menjajući se tokom vremena po nekim često slučajnim zakonima. Otuda okolina uvek deluje na sistem kao poremećaj. Da bi sistem izvršavao svoju funkciju na propisan način on treba da se prilagođava stohastički promenljivim uslovima okoline, tj. treba da ima svojstva fleksibilnosti, prepoznavanja, samopodešavanja, predviđanja, dakle i neki oblik inteligencije.

Autonomno vozilo
Potreba ka razvoju inteligentnih sistema je danas posebno prepoznata u slučaju automobilske i avio industrije, kako u civilne a naročito u vojne svrhe. Na primer, stalno unapređenje performansi motornih vozila i razvoj „pametnijih” i bezbednijih vozila se postavlja kao imperativ i dovodi do uvođenja inteligentnih rešenja i razvoja inteligentnih sistema vozila. Ovo se posebno odnosi na one sisteme koji su odgovorni za tzv. aktivnu bezbednost vozila, a time i bezbednost saobraćaja uopšte.
U opštem smislu, inteligentni sistemi treba da imaju mogućnost da: a) prikupljaju podatke o trenutnom radu/performansama sistema, b) modeliraju njihove performanse, c) prate i „mapiraju” okruženje posmatranog sistema i d) upravljaju njegovim radom. Ova uloga inteligentnih sistema će svakako doživeti svoju evoluciju u narednom periodu. Pre svega u smislu da će oni preuzimati sve veći broj zadataka u procesu donošenja odluka o potrebnom načinu rada sistema (monitoring, identifikacija, upravljanje i dr.) sve do trenutka njihovog potpuno autonomnog rada, odnosno autonomnog kretanja (motorna vozila, roboti i drugi).
Mobilnost putnika i robe su izuzetno važni za savremeno društvo, ali istovremeno predstavljaju ozbiljan problem u pogledu bezbednosti saobraćaja, uticaja na okolinu, ekonomičnosti potrošnje goriva i izazvanih zastoja u saobraćaju. Drumski saobraćaj na području Evropske unije je praćen velikim brojem saobraćajnih nesreća (1,3 miliona saobraćajnih nezgoda godišnje) sa oko 38000 poginulih svake godine i štetom čija cena premašuje 200 milijardi dolara godišnje. Ova cena predstavlja 2% bruto nacionalnog dohotka Evropske unije. Dosadašnja istraživanja pokazuju da je u preko 95% slučajeva ljudska greška uzrok saobraćajnih nesreća. Jedan od najvažnijih zahteva negde preko 300 miliona vozača na putevima Evropske unije, kao i drugih zemalja u okruženju, je drastično smanjenje verovatnoće nastanka saobraćajne nesreće i naročito povređivanja putnika, tj. svih učesnika u saobraćaju.
Razvoj inteligentnih vozila je pre svega
vezan za poboljšanje načina upravljanja
dinamikom kretanja vozila (kočenje/pogon/
promena pravca kretanja) u cilju povećanja
njihove ukupne bezbednosti (aktivne,
pasivne i katalitičke).
Zbog toga usmeravanje pažnje inženjera u automobilskoj industriji ka razvoju inteligentnih sistema na vozilu, a time i inteligentnih vozila, vodi ka stvaranju uslova kada će sudar između vozila ili sudar vozila sa nekom preprekom biti praktično nemoguć. Time inteligentna vozila postaju nova paradigma bezbednosti vozila, a time i saobraćaja, odnosno primene savremenih tehnika i tehnologija.
Razvoj inteligentnih vozila je pre svega vezan za poboljšanje načina upravljanja dinamikom kretanja vozila (kočenje/pogon/promena pravca kretanja) u cilju povećanja njihove ukupne bezbednosti (aktivne, pasivne i katalitičke). Vozač preko točka upravljača, komandi za kočenje, pogonskog agregata i sistema za prenos snage vozila utiče na ponašanje vozila, odnosno saopštava svoje želje u pogledu željenog ponašanja/kretanja vozila.
S obzirom da se ovako izražene želje vozača u pogledu željenog kretanja vozila trebaju realizovati u interakciji točkova (pneumatika) i tla, jedno od suštinskih pitanja vezano za inteligentno upravljanje vozilom je razvoj mogućnosti za upravljanje klizanjem točka između pneumatika i tla tokom kočenja/pogona/upravljanja vozilom. Pored toga, od suštinske važnosti je „prepoznavanje” uslova okoline u kojima se vozilo trenutno nalazi. U cilju uvođenja inteligentnog upravljanja motornim vozilima i identifikacije uslova prianjanja kao i prepoznavanja okruženja vozila, potrebno je uvesti nove tehnike i metode koje će imati osobine veštačke inteligencije.

Komunikacija između vozila i autonomno (bez vozača) kretanje vozila.
Generalno, razvoj inteligentnih vozila se može posmatrati na više nivoa, ali najčešće na tri nivoa i to u pogledu sposobnosti (spremnosti) sistema na vozilu da preduzimaju autonomne radnje različitog stepena inteligentnosti: (a) Sistemi koji „savetuju” – upozoravaju/obaveštavaju vozača, u cilju njegovog informisanja o stanju (performansama) vozila i njegove okoline ili u cilju navođenja vozača ka preduzimanju odgovarajućih koraka, kako bi se izbegao sudar, na primer, ili kako bi se vozač što pre prilagodio željenim/mogućim uslovima kretanja, odnosno o pojavi otkaza u radu sistema, (b) Sistemi koji preuzimaju potpunu ili delimičnu kontrolu nad radom sistema/vozila, u određenim situacijama, u cilju obezbeđenja pomoći vozaču u upravljanju vozilom (npr. gubitak stabilnosti, sprečavanje blokada točkova i dr.) i (c) Sistemi koji preuzimaju potpunu kontrolu nad vozilom u svim uslovima kretanja vozila – autonomno kretanje vozila, što se vidi kao najviši stepen inteligentnosti vozila u njihovom budućem razvoju.
Najvažniji pravac istraživanja u pogledu uvođenja inteligentnih rešenja na vozilu i obezbeđenja što veće autonomije vozila je funkcionalna integracija pogona, kočenja i upravljanja kretanjem vozila kroz inteligentnije prilagođavanje trenutnim uslovima rada sistema (vozila kao celine) u dinamički promenljivom okruženju. Ovo se pre svega odnosi na kontrolu prianjanja u kontaktu pneumatik-tlo u zavisnosti od zahtevanog ponašanja vozila. Obezbeđenje inteligentnog ponašanja vozila, odnosno njegovih sistema, usko je povezano sa obezbeđenjem uslova za „merenje i učenje” o uticaju posmatranih veličina na postignute performanse posmatranog sistema. Učenje na osnovu prethodnih „iskustava” je izuzetno važno za razvoj budućih inteligentnih sistema na vozilu, za poznatu (izmerenu/izračunatu) dinamičku promenu uticajnih veličina, kako bi se stvorili uslovi za zaključivanje (generalizaciju) i podršku donošenju odluka o budućem ponašanju/performansama vozila u istovetnim, sličnim ili potpuno novim situacijama.

Pametni gradovi i pametna vozila.
Uvođenjem funkcionalne integracije sistema na vozilu, kočni sistem je postao jedan od ključnih sistema na vozilu, odgovoran za različite aspekte aktivne bezbednosti vozila, odnosno njegovo dinamičko ponašanje. Shodno tome, razvoj inteligentnih kočnih sistema i obezbeđenje uslova za inteligentno kočenje predstavlja jedan od najznačajnijih izazova u automobilskoj industriji 21. veka, ne samo u pogledu ukupnih kočnih performansi vozila već i kao izuzetno važan društveni, tehnološki i ekonomski izazov. Ovo naročito dobija na značaju uzimajući u obzir broj poginulih i visinu šteta prouzrokovanih velikim brojem saobraćajnih nezgoda u celom svetu.
Dosadašnji razvoj kočnih sistema je doživeo značajne rezultate, pre svega u oblasti razvoja prenosnih mehanizama kočnih sistema, kroz uvođenje elektronike i elektronskog prenosa komandi od vozača do izvršnih elemenata kočnog sistema. Time su obezbeđeni uslovi za brz odziv kočnog sistema u odnosu na želje vozača i/ili sistema koji upravlja performansama kočionog sistema, kao što su ABS/ASR/ESP/ESC/ROP. Inteligentno kočenje, odnosno upravljanje podužnim/poprečnim klizanjem u kontaktu pneumatika i tla, ne zahteva samo brz prenos komandnog signala od vozača do izvršnih elemenata kočnog sistema (kočnica), već i bolje razumevanje i aktivan pristup upravljanju performansama kočnica u skladu sa trenutnim uslovima prianjanja točkova.
Ključno pitanje u razvoju inteligentnog kočnog sistema je obezbeđivanje uslova za inteligentno prepoznavanje kritičnih situacija i autonomno generisanje potrebne, odnosno optimalne sile kočenja u situacijama kada je došlo do aktiviranja kočnog sistema od strane vozača i/ili usled njegovog autonomnog aktiviranja. Cilj je obezbediti funkcionisanje datog sistema na potrebnom (optimalnom) nivou i kada želja vozača postoji ali je neadekvatna u datoj situaciji, odnosno kada u radu sistema postoji pad performansi.
Očigledno je da postoji vrlo širok opseg u pogledu mogućih performansi budućeg inteligentnog kočnog sistema. Od pomoći (upozoravanje) vozaču, u situacijama kada kočni sistem pokazuje nedopustivi pad performansi, na primer, do potpuno autonomnog kočenja vozila, naročito u kritičnim situacijama. Važna osobina budućih inteligentnih kočnih sistema treba da bude bazirana na pravovremenom i tačnom prepoznavanju trenutnih uslova kretanja vozila i situacija u kojima vozilo može da se nađe. Ovo je važan preduslov za autonomno (adaptivno) prilagođavanje performansi sistema za kočenje datoj situaciji (gubitak stabilnosti, mogući sudar sa preprekom/vozilom i drugo).
Uvođenje inteligentnog kočenja otvara se nekoliko vrlo kompleksnih problema koji su vezani za rad kočnog sistema. To se pre svega odnosi na identifikaciju uslova u kontaktu pneumatika i tla (klizanje točkova) i razumevanje uticaja radnih režima kočnice na njene performanse. Pored toga od posebne važnosti je razvoj izvršnih uređaja kočnog sistema koji će omogućiti realizaciju inteligentnih rešenja u njihovom radu. Kao što je rečeno, precizna identifikaciju uslova prianjanja u kontaktu pneumatika i tla tokom ciklusa kočenja je jako važna. Ovo stoga da bi se obezbedili kriterijumi za usaglašavanje sila kočenja sa trenutnim uslovima prianjanja u podužnom i/ili bočnom pravcu. Naravno, ovo se dalje može iskoristiti i za inteligentno upravljanje kretanjem vozila i u vertikalnom pravcu (podešavanje karakteristika aktivnog oslanjanja vozila), odnosno upravljanje obrtnim momentom koji se preko sistema za prenos snage isporučuje pogonskim kretačima.
U tom smislu je potrebno mnogo inovativnije, preciznije pa samim tim i inteligentnije rešiti problem postizanja odgovarajućih performansi kočnog sistema vozila, koje je moguće preneti na podlogu u datom trenutku, u skladu sa željom vozača i/ili sistema koji je preuzeo kontrolu nad radom kočnog sistema. Inteligentnim usklađivanjem (adaptacijom) performansi kočnog sistema, bilo da je aktiviranje kočnog sistema inicirano od strane vozača i/ili autonomno od strane elektronskih sistema na vozilu, koji izvršavaju svoju funkciju preko kočnog sistema, sa uslovima prianjanja u kontaktu pneumatika i tla, bi se istovremeno omogućilo optimiziranje ne samo kočnih performansi vozila već, što je izuzetno važno, i stabilnosti vozila.
Sve ovo za posledicu ima razvoj novog koncepta sistema aktivnog upravljanja dinamikom kretanja vozila koji je baziran na performansama kočnog sistema i ključno zavisi od rada kočnog sistema. Ovaj koncept je vezan za uvođenje inteligentnog upravljanja vozilom, inteligentnog kočenja vozilom i obezbeđenje uslova za autonomno kretanje vozila u budućnosti.
Uloga vozača, kao do sada ubedljivo najboljeg „kontrolera” na vozilu, je izuzetno važna i treba vrlo pažljivo tražiti načine na koji će biti izvršena tranzicija ka delimičnom ili kasnije potpuno autonomnom radu vozila uz postepeno isključivanje vozača iz procesa donošenja nekih odluka. Jasno je da postoje situacije kada su želje vozača, u pogledu sile kočenja, na primer, bliske ili u saglasnosti sa trenutnim uslovima prianjanja između pneumatika i tla, ali i sve veći broj situacija kada prosečan, čak i dobro uvežban, vozač ne može na adekvatan način da odgovori na potrebu izvođenja složenih manevara tokom kretanja vozila i/ili pravovremenog uočavanja potencijalnih opasnosti na putu.
Dakle, uspostavljanje kompleksne, dinamički promenljive, funkcionalne korelacije između posmatranih veličina tokom rada sistema i/ili vozila, treba da omogući kreiranje „sopstvenog znanja” o procesu koji se modelira, tj. razvoj dinamičkih inteligentnih modela (modeli koji „uče iz iskustva” i modifikuju svoje performanse shodno promeni posmatranih uticajnih veličina). Razvoj dinamičkih modela rada pojedinih sistema na vozilu često nije moguće ostvariti primenom klasičnog matematičkog aparata. Zbog toga je potrebno pronaći rešenja problema vezanih za obezbeđenje inteligentnih funkcija u radu tehničkih sistema, odnosno funkcije „pametnih” vozila, „pametnih” kočnih sistema u dinamičkim i izraženo promenljivim uslovima okoline u kojoj se vozilo kreće.
Čime dolazimo do zaključka da i infrastruktura (okolina) vozila mora da dobije svoju novu inteligentniju „dimenziju” u cilju komunikacije sa vozilom i/ili vozačem ali i sa pešacima, bicklistima i svima koji učestvuju u saobraćaju. Dolazi vreme ubrzanog razvoja savremenenih načina komunikacija, brze razmene podataka i što je najvažnije otvaranja prostora za različite načine korišćenja raspoloživih podataka, kao i podataka o prikljupljenim podacima (meta podaci), tj. vreme veštačke inteligencije.
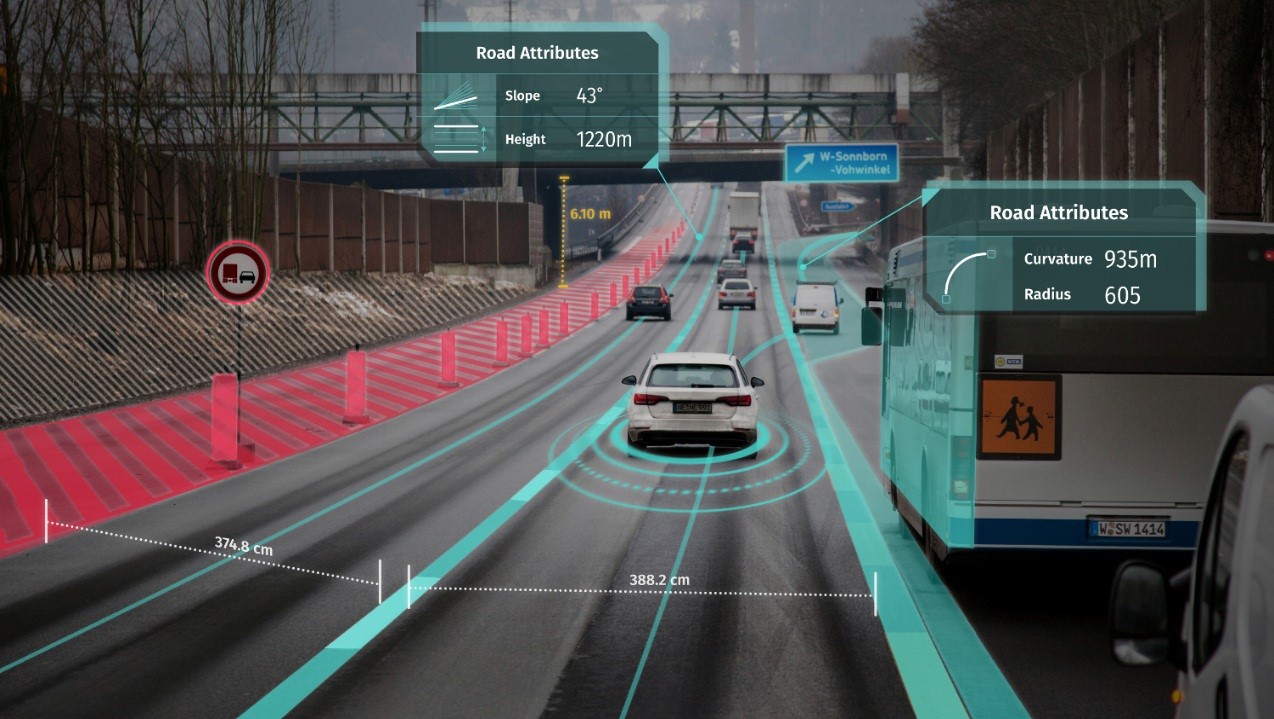
PAMETNA OKOLINA
Čovek nije ni svestan ogromnog broja proračuna i analiza koje naš mozak izvršava na podsvesnom nivou da bi u svojoj „bazi podataka” pronašao slične objekte i uporedio ih sa onim što upravo gledamo.
Razvoj autonomnih vozila ključno zavisi od razvoja sistema na vozilu za identifikaciju i prepoznavanje dinamički promenljive okoline (ostali učesnici u saobraćaju, infrastruktra, signalizacija i dr.) u kojoj vozilo izvršava svoju funkciju cilja. Kao i sve informacije, podaci o trenutnom stanju u bližem i daljem okruženju vozila moraju da budu pravovremene, dovoljno potpune i tačne. Očigledno da učešće autonomnih i inteligentnih vozila u saobraćaju zahteva i razvoj inteligentnijih uslova za odvijanje saobraćaja, odnosno za razvoj inteligentnih transportnih sistema. Inteligentni transportni sistemi omogućuju integraciju „pametnih” vozila i „pametni puteva”, odnosno omogućuju okruženje („pametni gradovi”) gde se kreira nešto sto se zove „inteligentna okolina”.
Cilj inteligentne okoline je da stvori „inteligenciju dnevnog prostora”, koja je odmah upotrebljiva i integrisana u kuće, kancelarije, na putevima, u automobilima i na bilo kojim drugim mestima. Ovaj novi koncept mora biti nevidljiv; mora se uklopiti u svačije normalno okruženje i mora biti dostupan kada je potrebno. U saobraćaju inteligentna okolina podrazumeva uvođenje novih načina za prepoznavanje situacija u saobraćaju. To se naročito odnosi na identifikaciju trenutnog okruženja vozila kao i komunikaciju između vozila, vozila i okoline (infrastrukture), ali i komunikaciju sa svim drugim učesnicima u saobraćaju (pešacima, signalizacijom na putevima, na primer).
Zahvaljujući ljudskom oku, koje obrađuje preko devet miliona podataka u sekundi, ljudski mozak vrlo lako, gotovo rutinski, prepoznaje različite obilke, lako ih svrstava u pojedine grupe–kategorije, iako su objekti u prirodi često različitih oblika, različito osvetljeni, skalirani, okrenuti, nesimetrični itd. Čovek nije ni svestan ogromnog broja proračuna i analiza koje naš mozak izvršava na podsvesnom nivou da bi u svojoj „bazi podataka” pronašao slične objekte i uporedio ih sa onim što upravo gledamo.
Pametna okolina
Sa druge strane, prepoznavanje objekata od strane budućeg inteligentnog sistema na vozilu, zaduženog za prepoznavanje okruženja vozila, nije ni malo lak inženjerski zadatak (treba uzeti u obzir da se okruženje i vrlo brzo menja) i spada u jedan od najvećih problema u razvoju veštačke inteligencije. Razlog je što sistem za prepoznavanje okruženja vozila koristi podatke sa većeg broja kamera, analizirajući svaki piksel a snimljene objekte „vidi” kao mešavinu linija i tačaka. Čak i prepoznati objekat se menja, može postati ne prepoznat, samo ako se malo pomeri, ako se vidi pod drugim uglom, ako je različito osvetljen noću i danju itd. Sve ovo stvara dopunske teškoće u porepoznavanju objekata od strane budućih inteligentnih sistema na vozilu.
Danas naučnici u oblasti veštačke inteligencije napuštaju tzv. pristup „odozgo nadole” (pokušavajući da predvide-programiraju sve moguće situacije u kojim će naći posmatani sistem) i prihvataju pristup „odozdo nagore”, koji, kao i tokom evolucije ljudske rase, omogućuje učenje, putem neuronskih mreža, i uvodi prirodni pristup učenju na greškama. Ovakav pristup u mnogome može da pomogne brzi razvoj bežičnih komunikacija koji će, zajedno sa budućim sistemima za prepoznavanje objekata, omogućiti brže učenje i snalaženje robotizovanih vozila, kako ih neko zove, u složenim i promenljivim uslovima u saobraćaju. Ovim dolazimo do potrebe razmene većeg broja podataka između vozila i vozila i putne infrastrukture kako bi omogućili budućim autonomnim vozila dovoljno podataka da uče o trenutnim uslovima u saobraćaju, kao podrška za donošenje odluka u bliskoj ili daljoj budućnosti.
Naime, sa brzim razvojem tehnologija bežične komunikacije, nova decentralizovana (ili polucentralizovana) arhitektura zasnovana na komunikaciji između vozila, stvorila je veliko interesovanje kod proizvođača vozila ali i telekomunikacionih operatera. Ovaj tip arhitekture se oslanja na distribuirani i autonomni sistem koji se sastoji se od samih vozila bez podrške fiksne infrastrukture za rutiranje podataka. U ovom slučaju govorimo o nekoj vrsti automobilske mreže. Svaki čvor (vozilo) u mreži može se smatrati davačem velikog kapaciteta, opremljenim različitim funkcijama, ili lokalnom mrežom koja se sastoji od postojećih terminala u vozilu.
Komunikacija između vozila (V2V; Vehicle-to-Vehicle) osmišljen je sistem za prenošenje osnovnih bezbednosnih informacija između vozila, u cilju pružanja usluga obaveštavanja vozača i/ili budućih autonomnih vozila u vezi sa predstojećim mogućim ili postojećim sudarima, odnosno o situaciji u saobraćaju. Mogućnost pouzdanog prenosa sve veće količine informacija u deliću sekunde će omogućiti učesnicima u saobraćaju da budu povezani međusobno, ali i sa saobraćajnom infrastrukturom, utemeljujući tako put za nove usluge i aplikacije. V2I (Vehicle-to-Infrastructure) bežična je tehnologija koja radi na 5,9 GHz u dometu kratke komunikacije a takođe omogućava širi set bezbednosnih i mobilnih aplikacija u kombinaciji sa kompatibilnom infrastrukturom za puteve. Shodno tome, japanski proizvođači automobila predstavljaju nov prototip vozila koji omogućuju tzv. „mobilno partnerstvo” u kojem vozač i veštačka inteligencija sarađuju kao tim u vozilu.
Naravno, ove nove tehnologije otvaraju mnoga nova pitanja i zabrinutosti pre svega vozača, odnosno, bolje rečeno, budućih korisnika vozila (putnika). Prema nekim istraživanjima je utvrđeno da su vozači najviše izrazili zabrinutost zbog sajber bezbednosti, tj. 81% njih je zabrinuto zbog kompjuterskog hakovanja koji bi mogli da kontrolišu i njihovo vozilo. Na drugom mestu, 75% ispitanih je zabrinuto da bi kompanije prikupljale lične podatke iz njihovih vozila, dok je 70% zabrinuto da bi kompanije slale podatke o njima određenim ministarstvima. Kod vozača može da se javi odbojnost za ove sisteme jer se boje da se ne naruši njihova privatnost.
(Izvor Ingeniosus)






Odavno ne pročitaj bolji članak nekog nuačnika koji je tako razumljivo i ubedljivo objasnio upotrebu veštačke inteligencije u drusmkom saobraćaju. Prvi ut čujem za časopis ili sajt pod imenom Ingeniosus. Je li domaći?
To je naučnopopularni list Mašinskog fakulteta u Beogradu, za koji pišu njegovi studenti, stručnjaci, profesori i naučnici koji sada žive u inostranstvu, a stekli ovde diplomu inženjera. Stanko Stojiljković