


Две највеће мистерије у природи су: УМ и ВАСИОНА. Захваљујући моћној технологији у стању смо да фотографишемо галаксије далеке милијарду светлосних година. Међутим, шта је са људским мозгом, да ли га добро познајемо или да ли га уопште знамо? Да ли је могуће вештачки развити интелигентне системе ако не знамо тачно на који начин функционише људски мозак, који опет даље користимо приликом пројектовања и развоја вештачке интелигенције?

Проф. др Драган Алексендрић
Људски мозак тежи само око килограм и по а ипак је најсложенији објекат у Сунчевом систему. Шта је то што људима даје предност у односу на друге животиње? То је свест.
Свест је процес прављења МОДЕЛА света помоћу већег броја петљи повратне спреге разних параметара (нпр. температуре, простора, времена, односа са другим људима…) како би се остварио циљ. Ово се назива просторно-временском теоријом свести јер наглашава идеју да животиње модел света стварају претежно у односу на простор и на друге животиње, док људи иду корак даље и модел света граде према времену, како спрам прошлости тако и спрам будућности. Шта раздваја људску свест од животињске? ЈЕДИНО ЉУДИ РАЗУМЕЈУ KОНЦЕПТ СУТРАШЊИЦЕ!
Многи верују да јединствене особине људских
бића, као што су креативност, емоције,
свест не могу бити репродуковане од стране
неког другог техничког система.
За разлику од животиња, једино људи се непрестано питају „шта-ако”, на овај начин се прави оквир за предвиђање будућих догађаја. Дакле, људи непрестано процењују прошлост како би се симулирала будућност! Овим долазимо до кључне особине будућих интелигентних система, односно вештачке интелигенције, као окоснице индустријског развоја у 21. веку, а то је развој интелигентних машина и модела који описују рад и перформансе техничких система. На основу ове способности и оваквих модела, могуће је вршити предвиђања њхових перформанси и понашања у будућности. То је управо оно што наш мозак непрестано ради!
Многи верују да јединствене особине људских бића, као што су креативност, емоције, свест не могу бити репродуковане од стране неког другог техничког система. Тиме се долази до кључног питања а то је шта се може сматрати интелигентним системом у техници и на који начин у будућности омогућити да посматрани систем постане, односно задржи жељени ниво интелигентности. Уколико желимо да неки систем у дужем временском периоду задржи и унапређује своје особине, такав систем би требало да има уграђене механизме да учи, изводи закључке и прилагођава се новим условима рада.
Важне особине будућих интелигентних
система треба да буду: учење, „креативност”,
брзина „мишљења”, резоновање, разумевање,
аутономно понашање, адаптибилност,
способност самоорганизовања, поседовање
знања и друге.
Општа дефиниција шта је то интелигентно а шта не није до сада усвојена и често се различито тумачи делом и због тога што она треба да прати свеукупни развој друштва и технике. Дакле, важне особине будућих интелигентних система треба да буду: учење, „креативност”, брзина „мишљења”, резоновање, разумевање, аутономно понашање, адаптибилност, способност самоорганизовања, поседовање знања и др. Са друге стране, нико други, сем људских бића, не може испунити све ове захтеве интелигентности.
Међутим, ако систем испуњава неке од горе наведених атрибута, тада би он поседовао и неки облик интелигенције. На основу овога можемо закључити да систем који ради довољно брзо, за дате радне услове, и који има извесне особине логичког резоновања, би могао бити сврстан у групу „паметних“ система. Јасно је да у будућности можемо да говоримо о различитим облицима и степенима интелигентности машина, возила, пројектила и тако даље, с обзиром на различите потребе (које се такође мењају) у погледу извршавања функције циља појединих система у техници.
По многим филозофским концепцијама
знање представља тврђење за које је утврђено
или може бити утврђено да је тачно.
Уобичајено се под интелигенцијом подразумева способност усвајања, памћења и обраде одређених података и њихово претварање у различите врсте знања. Ипак до сада ниједна дефиниција вештачке интелигенције није опште прихваћена. У општем случају се може сматрати да интелигенција подразумева: способност памћења, складиштења података, претраживања података и могућност њихове обраде у циљу доношења одлука у новим, односно непознатим околностима. При томе је важно омогућити добру генерализацију уочених законитости као и њихово представљање и пресликавање у форми разумљивој људима, лако модификовање уз смањење укупног броја могућности које би требало разматрати.
По многим филозофским концепцијама знање представља тврђење за које је утврђено или може бити утврђено да је тачно. Са друге стране, често постоји потреба за радом и са подацима који не морају да буду тачни или бар не потпуно тачни, па је боље прихватити шири појам знања и под њиме подразумевати и истините, потврђене чињенице, али и хипотезе, непотпуне информације, као и оне дате са одређеном вероватноћом. Избор репрезентације знања је један од кључних проблема и он је у директној вези са природом одређеног знања, али и са природом механизама за закључивање. Ово поставља велике изазове у инжењерству интелигентних система.
Kада говоримо о системима у техници, овај појам се користи за описивање неког организационог скупа, сличних или различитих елемената, обједињених одређеним заједничким обележјима или функцијама. Систем у техници је организован скуп елемената обједињених заједничком функцијом циља. Задатак система у техници се своди на претварање улазних величина у излазне величине и то у одређеном периоду времена.
Савремени системи у техници имају изразито динамички карактер промене улаза и/или излаза. Поред тога, систем генерално увек извршава своју функцију циља у некој околини која на њега утиче посредно или непосредно. Важно је нагласити да је околина, по својој природи и карактеру готово увек стохастичка, мењајући се током времена по неким често случајним законима. Отуда околина увек делује на систем као поремећај. Да би систем извршавао своју функцију на прописан начин он треба да се прилагођава стохастички променљивим условима околине, тј. треба да има својства флексибилности, препознавања, самоподешавања, предвиђања, дакле и неки облик интелигенције.

Аутономно возило
Потреба ка развоју интелигентних система је данас посебно препозната у случају аутомобилске и авио индустрије, како у цивилне а нарочито у војне сврхе. На пример, стално унапређење перформанси моторних возила и развој „паметнијих” и безбеднијих возила се поставља као императив и доводи до увођења интелигентних решења и развоја интелигентних система возила. Ово се посебно односи на оне системе који су одговорни за тзв. активну безбедност возила, а тиме и безбедност саобраћаја уопште.
У општем смислу, интелигентни системи треба да имају могућност да: а) прикупљају податке о тренутном раду/перформансама система, б) моделирају њихове перформансе, ц) прате и „мапирају” окружење посматраног система и д) управљају његовим радом. Ова улога интелигентних система ће свакако доживети своју еволуцију у наредном периоду. Пре свега у смислу да ће они преузимати све већи број задатака у процесу доношења одлука о потребном начину рада система (мониторинг, идентификација, управљање и др.) све до тренутка њиховог потпуно аутономног рада, односно аутономног кретања (моторна возила, роботи и други).
Мобилност путника и робе су изузетно важни за савремено друштво, али истовремено представљају озбиљан проблем у погледу безбедности саобраћаја, утицаја на околину, економичности потрошње горива и изазваних застоја у саобраћају. Друмски саобраћај на подручју Европске уније је праћен великим бројем саобраћајних несрећа (1,3 милиона саобраћајних незгода годишње) са око 38000 погинулих сваке године и штетом чија цена премашује 200 милијарди долара годишње. Ова цена представља 2% бруто националног дохотка Европске уније. Досадашња истраживања показују да је у преко 95% случајева људска грешка узрок саобраћајних несрећа. Један од најважнијих захтева негде преко 300 милиона возача на путевима Европске уније, као и других земаља у окружењу, је драстично смањење вероватноће настанка саобраћајне несреће и нарочито повређивања путника, тј. свих учесника у саобраћају.
Развој интелигентних возила је пре свега
везан за побољшање начина управљања
динамиком кретања возила (кочење/погон/
промена правца кретања) у циљу повећања
њихове укупне безбедности (активне,
пасивне и каталитичке).
Због тога усмеравање пажње инжењера у аутомобилској индустрији ка развоју интелигентних система на возилу, а тиме и интелигентних возила, води ка стварању услова када ће судар између возила или судар возила са неком препреком бити практично немогућ. Тиме интелигентна возила постају нова парадигма безбедности возила, а тиме и саобраћаја, односно примене савремених техника и технологија.
Развој интелигентних возила је пре свега везан за побољшање начина управљања динамиком кретања возила (кочење/погон/промена правца кретања) у циљу повећања њихове укупне безбедности (активне, пасивне и каталитичке). Возач преко точка управљача, команди за кочење, погонског агрегата и система за пренос снаге возила утиче на понашање возила, односно саопштава своје жеље у погледу жељеног понашања/кретања возила.
С обзиром да се овако изражене жеље возача у погледу жељеног кретања возила требају реализовати у интеракцији точкова (пнеуматика) и тла, једно од суштинских питања везано за интелигентно управљање возилом је развој могућности за управљање клизањем точка између пнеуматика и тла током кочења/погона/управљања возилом. Поред тога, од суштинске важности је „препознавање” услова околине у којима се возило тренутно налази. У циљу увођења интелигентног управљања моторним возилима и идентификације услова приањања као и препознавања окружења возила, потребно је увести нове технике и методе које ће имати особине вештачке интелигенције.

Kомуникација између возила и аутономно (без возача) кретање возила.
Генерално, развој интелигентних возила се може посматрати на више нивоа, али најчешће на три нивоа и то у погледу способности (спремности) система на возилу да предузимају аутономне радње различитог степена интелигентности: (а) Системи који „саветују” – упозоравају/обавештавају возача, у циљу његовог информисања о стању (перформансама) возила и његове околине или у циљу навођења возача ка предузимању одговарајућих корака, како би се избегао судар, на пример, или како би се возач што пре прилагодио жељеним/могућим условима кретања, односно о појави отказа у раду система, (б) Системи који преузимају потпуну или делимичну контролу над радом система/возила, у одређеним ситуацијама, у циљу обезбеђења помоћи возачу у управљању возилом (нпр. губитак стабилности, спречавање блокада точкова и др.) и (ц) Системи који преузимају потпуну контролу над возилом у свим условима кретања возила – аутономно кретање возила, што се види као највиши степен интелигентности возила у њиховом будућем развоју.
Најважнији правац истраживања у погледу увођења интелигентних решења на возилу и обезбеђења што веће аутономије возила је функционална интеграција погона, кочења и управљања кретањем возила кроз интелигентније прилагођавање тренутним условима рада система (возила као целине) у динамички променљивом окружењу. Ово се пре свега односи на контролу приањања у контакту пнеуматик-тло у зависности од захтеваног понашања возила. Обезбеђење интелигентног понашања возила, односно његових система, уско је повезано са обезбеђењем услова за „мерење и учење” о утицају посматраних величина на постигнуте перформансе посматраног система. Учење на основу претходних „искустава” је изузетно важно за развој будућих интелигентних система на возилу, за познату (измерену/израчунату) динамичку промену утицајних величина, како би се створили услови за закључивање (генерализацију) и подршку доношењу одлука о будућем понашању/перформансама возила у истоветним, сличним или потпуно новим ситуацијама.

Паметни градови и паметна возила.
Увођењем функционалне интеграције система на возилу, кочни систем је постао један од кључних система на возилу, одговоран за различите аспекте активне безбедности возила, односно његово динамичко понашање. Сходно томе, развој интелигентних кочних система и обезбеђење услова за интелигентно кочење представља један од најзначајнијих изазова у аутомобилској индустрији 21. века, не само у погледу укупних кочних перформанси возила већ и као изузетно важан друштвени, технолошки и економски изазов. Ово нарочито добија на значају узимајући у обзир број погинулих и висину штета проузрокованих великим бројем саобраћајних незгода у целом свету.
Досадашњи развој кочних система је доживео значајне резултате, пре свега у области развоја преносних механизама кочних система, кроз увођење електронике и електронског преноса команди од возача до извршних елемената кочног система. Тиме су обезбеђени услови за брз одзив кочног система у односу на жеље возача и/или система који управља перформансама кочионог система, као што су ABS/ASR/ESP/ESC/ROP. Интелигентно кочење, односно управљање подужним/попречним клизањем у контакту пнеуматика и тла, не захтева само брз пренос командног сигнала од возача до извршних елемената кочног система (кочница), већ и боље разумевање и активан приступ управљању перформансама кочница у складу са тренутним условима приањања точкова.
Kључно питање у развоју интелигентног кочног система је обезбеђивање услова за интелигентно препознавање критичних ситуација и аутономно генерисање потребне, односно оптималне силе кочења у ситуацијама када је дошло до активирања кочног система од стране возача и/или услед његовог аутономног активирања. Циљ је обезбедити функционисање датог система на потребном (оптималном) нивоу и када жеља возача постоји али је неадекватна у датој ситуацији, односно када у раду система постоји пад перформанси.
Очигледно је да постоји врло широк опсег у погледу могућих перформанси будућег интелигентног кочног система. Од помоћи (упозоравање) возачу, у ситуацијама када кочни систем показује недопустиви пад перформанси, на пример, до потпуно аутономног кочења возила, нарочито у критичним ситуацијама. Важна особина будућих интелигентних кочних система треба да буде базирана на правовременом и тачном препознавању тренутних услова кретања возила и ситуација у којима возило може да се нађе. Ово је важан предуслов за аутономно (адаптивно) прилагођавање перформанси система за кочење датој ситуацији (губитак стабилности, могући судар са препреком/возилом и друго).
Увођење интелигентног кочења отвара се неколико врло комплексних проблема који су везани за рад кочног система. То се пре свега односи на идентификацију услова у контакту пнеуматика и тла (клизање точкова) и разумевање утицаја радних режима кочнице на њене перформансе. Поред тога од посебне важности је развој извршних уређаја кочног система који ће омогућити реализацију интелигентних решења у њиховом раду. Kао што је речено, прецизна идентификацију услова приањања у контакту пнеуматика и тла током циклуса кочења је јако важна. Ово стога да би се обезбедили критеријуми за усаглашавање сила кочења са тренутним условима приањања у подужном и/или бочном правцу. Наравно, ово се даље може искористити и за интелигентно управљање кретањем возила и у вертикалном правцу (подешавање карактеристика активног ослањања возила), односно управљање обртним моментом који се преко система за пренос снаге испоручује погонским кретачима.
У том смислу је потребно много иновативније, прецизније па самим тим и интелигентније решити проблем постизања одговарајућих перформанси кочног система возила, које је могуће пренети на подлогу у датом тренутку, у складу са жељом возача и/или система који је преузео контролу над радом кочног система. Интелигентним усклађивањем (адаптацијом) перформанси кочног система, било да је активирање кочног система иницирано од стране возача и/или аутономно од стране електронских система на возилу, који извршавају своју функцију преко кочног система, са условима приањања у контакту пнеуматика и тла, би се истовремено омогућило оптимизирање не само кочних перформанси возила већ, што је изузетно важно, и стабилности возила.
Све ово за последицу има развој новог концепта система активног управљања динамиком кретања возила који је базиран на перформансама кочног система и кључно зависи од рада кочног система. Овај концепт је везан за увођење интелигентног управљања возилом, интелигентног кочења возилом и обезбеђење услова за аутономно кретање возила у будућности.
Улога возача, као до сада убедљиво најбољег „контролера” на возилу, је изузетно важна и треба врло пажљиво тражити начине на који ће бити извршена транзиција ка делимичном или касније потпуно аутономном раду возила уз постепено искључивање возача из процеса доношења неких одлука. Јасно је да постоје ситуације када су жеље возача, у погледу силе кочења, на пример, блиске или у сагласности са тренутним условима приањања између пнеуматика и тла, али и све већи број ситуација када просечан, чак и добро увежбан, возач не може на адекватан начин да одговори на потребу извођења сложених маневара током кретања возила и/или правовременог уочавања потенцијалних опасности на путу.
Дакле, успостављање комплексне, динамички променљиве, функционалне корелације између посматраних величина током рада система и/или возила, треба да омогући креирање „сопственог знања” о процесу који се моделира, тј. развој динамичких интелигентних модела (модели који „уче из искуства” и модификују своје перформансе сходно промени посматраних утицајних величина). Развој динамичких модела рада појединих система на возилу често није могуће остварити применом класичног математичког апарата. Због тога је потребно пронаћи решења проблема везаних за обезбеђење интелигентних функција у раду техничких система, односно функције „паметних” возила, „паметних” кочних система у динамичким и изражено променљивим условима околине у којој се возило креће.
Чиме долазимо до закључка да и инфраструктура (околина) возила мора да добије своју нову интелигентнију „димензију” у циљу комуникације са возилом и/или возачем али и са пешацима, бицклистима и свима који учествују у саобраћају. Долази време убрзаног развоја савременених начина комуникација, брзе размене података и што је најважније отварања простора за различите начине коришћења расположивих података, као и података о прикљупљеним подацима (мета подаци), тј. време вештачке интелигенције.
ПАМЕТНА ОКОЛИНА
Човек није ни свестан огромног броја прорачуна и анализа које наш мозак извршава на подсвесном нивоу да би у својој „бази података” пронашао сличне објекте и упоредио их са оним што управо гледамо.
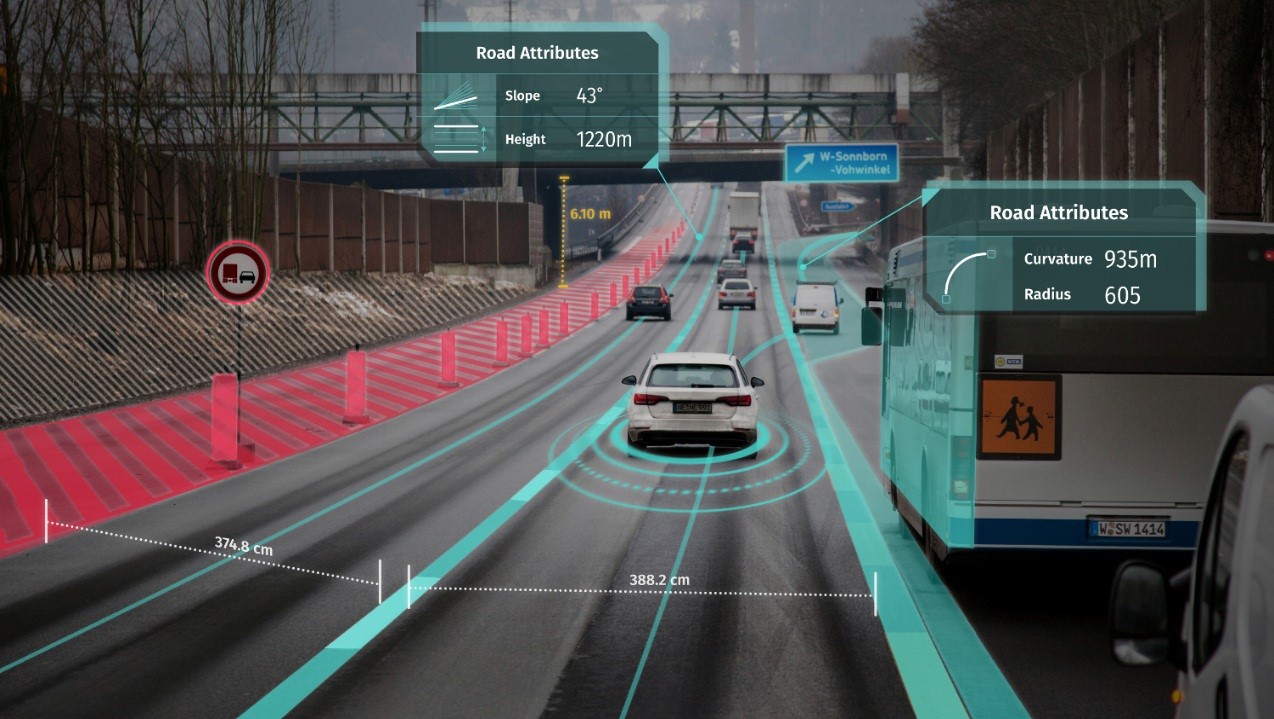
Развој аутономних возила кључно зависи од развоја система на возилу за идентификацију и препознавање динамички променљиве околине (остали учесници у саобраћају, инфраструктра, сигнализација и др.) у којој возило извршава своју функцију циља. Kао и све информације, подаци о тренутном стању у ближем и даљем окружењу возила морају да буду правовремене, довољно потпуне и тачне. Очигледно да учешће аутономних и интелигентних возила у саобраћају захтева и развој интелигентнијих услова за одвијање саобраћаја, односно за развој интелигентних транспортних система. Интелигентни транспортни системи омогућују интеграцију „паметних” возила и „паметни путева”, односно омогућују окружење („паметни градови”) где се креира нешто сто се зове „интелигентна околина”.
Циљ интелигентне околине је да створи „интелигенцију дневног простора”, која је одмах употреблјива и интегрисана у куће, канцеларије, на путевима, у аутомобилима и на било којим другим местима. Овај нови концепт мора бити невидлјив; мора се уклопити у свачије нормално окружење и мора бити доступан када је потребно. У саобраћају интелигентна околина подразумева увођење нових начина за препознавање ситуација у саобраћају. То се нарочито односи на идентификацију тренутног окружења возила као и комуникацију између возила, возила и околине (инфраструктуре), али и комуникацију са свим другим учесницима у саобраћају (пешацима, сигнализацијом на путевима, на пример).
Захваљујући људском оку, које обрађује преко девет милиона података у секунди, људски мозак врло лако, готово рутински, препознаје различите обилке, лако их сврстава у поједине групе–категорије, иако су објекти у природи често различитих облика, различито осветљени, скалирани, окренути, несиметрични итд. Човек није ни свестан огромног броја прорачуна и анализа које наш мозак извршава на подсвесном нивоу да би у својој „бази података” пронашао сличне објекте и упоредио их са оним што управо гледамо.
Паметна околина
Са друге стране, препознавање објеката од стране будућег интелигентног система на возилу, задуженог за препознавање окружења возила, није ни мало лак инжењерски задатак (треба узети у обзир да се окружење и врло брзо мења) и спада у један од највећих проблема у развоју вештачке интелигенције. Разлог је што систем за препознавање окружења возила користи податке са већег броја камера, анализирајући сваки пиксел а снимљене објекте „види” као мешавину линија и тачака. Чак и препознати објекат се мења, може постати не препознат, само ако се мало помери, ако се види под другим углом, ако је различито осветљен ноћу и дању итд. Све ово ствара допунске тешкоће у порепознавању објеката од стране будућих интелигентних система на возилу.
Данас научници у области вештачке интелигенције напуштају тзв. приступ „одозго надоле” (покушавајући да предвиде-програмирају све могуће ситуације у којим ће наћи посматани систем) и прихватају приступ „одоздо нагоре”, који, као и током еволуције људске расе, омогућује учење, путем неуронских мрежа, и уводи природни приступ учењу на грешкама. Овакав приступ у многоме може да помогне брзи развој бежичних комуникација који ће, заједно са будућим системима за препознавање објеката, омогућити брже учење и сналажење роботизованих возила, како их неко зове, у сложеним и променљивим условима у саобраћају. Овим долазимо до потребе размене већег броја података између возила и возила и путне инфраструктуре како би омогућили будућим аутономним возила довољно података да уче о тренутним условима у саобраћају, као подршка за доношење одлука у блиској или даљој будућности.
Наиме, са брзим развојем технологија бежичне комуникације, нова децентрализована (или полуцентрализована) архитектура заснована на комуникацији између возила, створила је велико интересовање код произвођача возила али и телекомуникационих оператера. Овај тип архитектуре се ослања на дистрибуирани и аутономни систем који се састоји се од самих возила без подршке фиксне инфраструктуре за рутирање података. У овом случају говоримо о некој врсти аутомобилске мреже. Сваки чвор (возило) у мрежи може се сматрати давачем великог капацитета, опремлјеним различитим функцијама, или локалном мрежом која се састоји од постојећих терминала у возилу.
Kомуникација између возила (V2V; Vehicle-to-Vehicle) осмишљен је систем за преношење основних безбедносних информација између возила, у циљу пружања услуга обавештавања возача и/или будућих аутономних возила у вези са предстојећим могућим или постојећим сударима, односно о ситуацији у саобраћају. Могућност поузданог преноса све веће количине информација у делићу секунде ће омогућити учесницима у саобраћају да буду повезани међусобно, али и са саобраћајном инфраструктуром, утемелјујући тако пут за нове услуге и апликације. V2I (Vehicle-to-Infrastructure) бежична је технологија која ради на 5,9 GHz у домету кратке комуникације а такође омогућава шири сет безбедносних и мобилних апликација у комбинацији са компатибилном инфраструктуром за путеве. Сходно томе, јапански произвођачи аутомобила представљају нов прототип возила који омогућују тзв. „мобилно партнерство” у којем возач и вештачка интелигенција сарађују као тим у возилу.
Наравно, ове нове технологије отварају многа нова питања и забринутости пре свега возача, односно, боље речено, будућих корисника возила (путника). Према неким истраживањима је утврђено да су возачи највише изразили забринутост због сајбер безбедности, тј. 81% њих је забринуто због компјутерског хаковања који би могли да контролишу и њихово возило. На другом месту, 75% испитаних је забринуто да би компаније прикуплјале личне податке из њихових возила, док је 70% забринуто да би компаније слале податке о њима одређеним министарствима. Kод возача може да се јави одбојност за ове системе јер се боје да се не наруши њихова приватност.
(Извор Ингениосус)






Odavno ne pročitaj bolji članak nekog nuačnika koji je tako razumljivo i ubedljivo objasnio upotrebu veštačke inteligencije u drusmkom saobraćaju. Prvi ut čujem za časopis ili sajt pod imenom Ingeniosus. Je li domaći?
То је научнопопуларни лист Машинског факултета у Београду, за који пишу његови студенти, стручњаци, професори и научници који сада живе у иностранству, а стекли овде диплому инжењера. Станко Стојиљковић